2D视觉定位引导系列 7 先取后拍原理及动画模拟仿真
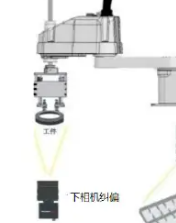
今天主要讲解先先取后拍的方式,下相机拍照,引导机器人去固定点放物料。
机械手抓取物料后移动到下相机拍照位置拍照,计算放料误差,然后去放料点放置物料。
先抓后拍和先拍后抓 区别不大,前面的处理方式基本一致,在计算偏移量的时候有少许区别。
今天主要讲解先先取后拍的方式,下相机拍照,引导机器人去固定点放物料。
机械手抓取物料后移动到下相机拍照位置拍照,计算放料误差,然后去放料点放置物料。
先抓后拍和先拍后抓 区别不大,前面的处理方式基本一致,在计算偏移量的时候有少许区别。
1.set_shape_model_origin 作用 用来给已经创建的模板设定原点。模板在创建以后默认的原点为创建图R…
阅读全文 »