2D视觉定位引导系列 8 先拍后放原理及动画模拟仿真
篇我们主题是先拍(拍物料放置区域,如手机屏外框),引导机械手 去放料。整个计算逻辑和先拍后抓一样。理解先拍后抓后
理解本篇比较容易。这种模式要求物料来料位置和角度误差较小,只拍物料放置框就可保证能准确放置进去。如果来料的误差也很大,那就是我们
下篇文章要涉及内容,对位贴合,暂且不表。
篇我们主题是先拍(拍物料放置区域,如手机屏外框),引导机械手 去放料。整个计算逻辑和先拍后抓一样。理解先拍后抓后
理解本篇比较容易。这种模式要求物料来料位置和角度误差较小,只拍物料放置框就可保证能准确放置进去。如果来料的误差也很大,那就是我们
下篇文章要涉及内容,对位贴合,暂且不表。
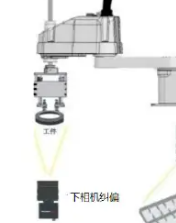
今天主要讲解先先取后拍的方式,下相机拍照,引导机器人去固定点放物料。
机械手抓取物料后移动到下相机拍照位置拍照,计算放料误差,然后去放料点放置物料。
先抓后拍和先拍后抓 区别不大,前面的处理方式基本一致,在计算偏移量的时候有少许区别。
halcon 代码仿真整个先拍后抓定位引导过程。让大家即使在没有相机和机械手的情况下依然能学习和了解这个纠偏过程。
阅读全文 »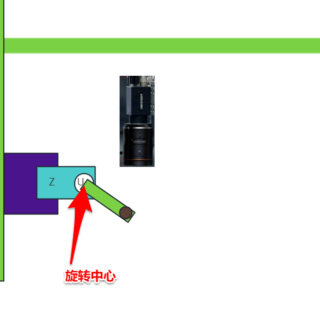
关于标定写了4篇文章,一次如下 2D视觉定位引导系列 1 图解9点标定及仿真 2D视觉定位引导系列 2 图解12点标定及…
阅读全文 »
对比了相机运动和相机静止模式标定。给出了相机运动模式下的标定方法
阅读全文 »
前面 2篇文章, 2D视觉定位引导系列 1 图解9点标定及仿真 2D视觉定位引导系列 2 图解12点标定及仿真 对标定进…
阅读全文 »
通过模拟仿真的方式,解释9点标定和12点标定。
阅读全文 »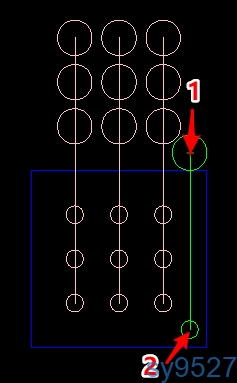
2D视觉定位引导 9点标定的仿真和理解
阅读全文 »