关于标定写了4篇文章,一次如下
4篇文章分别说明了9点标定12点标定,以及相机运动和静止标定数据的一些处理技巧
由于海康VM现在使用越来越多。特地对里面的N点标定模块拿出来加以测试说明,顺便研究了一下里面的数据处理
过程。关于标定还有些点没有涉及比如,运动轴分离,相机轴运行等,后面有空在慢慢细说。
由于能力有限,文章中难免有些许纰漏欢迎大家批评指正。
目前看来,结合现场应用
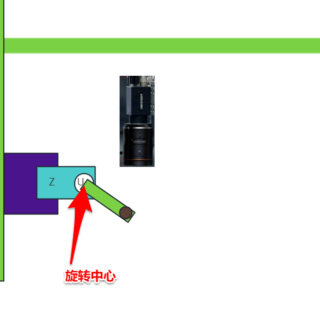
海康的N点标定涉及思路很好,应该借鉴。但是他没有说明N点内部原理,我浅浅的研究了下。
旋转归一化(参考第三篇文章),适用于相机运动和静止模式,将二者融合一体。我现在就是使用这种方式。当然用第二篇文章中的也行
但是在标定相机运动这种模式比较麻烦,必须在拍照位标定,不然拍照位置动了,标定数据又出问题。
起始归根结底:2D视觉的9点标定,12点标定 分为2种,绝对标定和相对标定
绝对标定:实用于相机固定拍照,通过2D视觉定位引导系列 2 图解12点标定及仿真中的方法,像素转换得到的是绝对物理坐标
相对标定:实用与相机固定和移动2中方式。此种方式(2D视觉定位引导系列 3 探讨海康 VisionMaster N点标定的内部原理)将标定起始点设定为(0,0),像素转换得到的是相对物理坐标
相对坐标得加上拍照位置坐标才能得到实际物理坐标。
总统来看推荐相对标定实用性跟广。
标定看似是个很简单的过程,但是做好也绝非易事,需要操作者有丰富的现场操作经验和对标定算法的理解。
如果标定这步做的不好,后面纠偏出了问题,也无从下手。所有建议大家好好读读这四篇文章,你的老师傅可能不会和你说这些。
好了标定暂时告一段落,后面文章将主要讨论定位引导的关键问题
主要涉及
抓取前上相机定位
抓取后下相机定位
放置前定位
多相机融合标定
大尺寸双向机定位
。。。。
敬请期待
疑问留言 或者 添加下面2种方式 交流


暂无评论